MEMS 组合导航模块 产品规格书
1. 产品简介
ZK-INS2602 是一款邮票封装的组合导航模块级产品,内置 MEMS IMU 惯性测量单元、高精度双天线 GNSS 和导航计算机,外接 GNSS 接收天线,采用多源卡尔曼滤波融合算法,提供载体在多种环境下的高精度定位、导航参数。
2. 适用范围
ZK-INS2602 适用于静态、动态载体的定位、定向、姿态测量,如卫星通信地面站静中通、“动中通”,无人车、无人机、智能驾驶、测量测绘、单兵设备等。
3. 产品特点
4. 技术参数指标
| 参数名称 | 参数指标 | 备注 |
|---|
| 启动时间 |
|
|
| GNSS 冷启动定位时间 | < 30s |
| 组合导航对准时间 | < 50s |
| 卫星导航精度 |
|
|
| 单点定位精度 (RMS) | 1.5m(水平) / 2.5m(高程) |
| 定向精度 (RMS) | 0.2°(1 米基线) |
| 速度精度 (RMS) | 0.03m/s |
| 授时精度 (RMS) | 20ns |
| 组合导航精度 |
|
|
| 位置精度 (CEP) | 1.5m(水平) / 2.5m(高程) |
| 航向精度 (1σ) | 0.2°(双天线,1 米基线)0.2°(单天线,运动)0.15 °/min(GNSS 失效) |
| 速度精度 (1σ) | 0.03m/s(双天线,1 米基线)0.03m/s(单天线,运动)0.03m/s(GNSS 失效) |
| 姿态精度 (1σ) | 0.1°0.1°(GNSS 失效) |
| 陀螺仪精度 |
|
|
| 测量量程 | ±500°/s |
| 零偏稳定性 | ≤8(°/h) (1σ) |
| 零偏不稳定性 | ≤2.5(°/h) |
| 加速度计精度 |
|
|
| 测量量程 | ±10g |
| 零偏稳定性 | ≤0.2mg(1σ) |
| 零偏不稳定性 | ≤0.05 mg |
| 数据更新率 |
|
|
| GNSS 导航数据 | 1/5/10Hz,可配置 |
| 组合导航数据 | 1/5/10/20/25/50/100Hz/200Hz,可配置 |
| IMU 原始数据 | 1/5/10/20/25/50/100Hz/200Hz,可配置 |
| 通讯接口 |
|
|
| CAN | 1 路,TTL,3.3V 电平 |
| 串口 | 3 路,TTL,3.3V 电平 |
| 供电特性 |
|
|
| 模块供电电压 | 3.3VDC ±10% |
| 模块额定电流 | 0.3A |
| GNSS 天线供电 | 3.3〜12VDC 适配天线 |
| 物理特性 |
|
|
| GNSS 天线接口 | IPEX-1 插座 |
| 封装型式 | 邮票封装 |
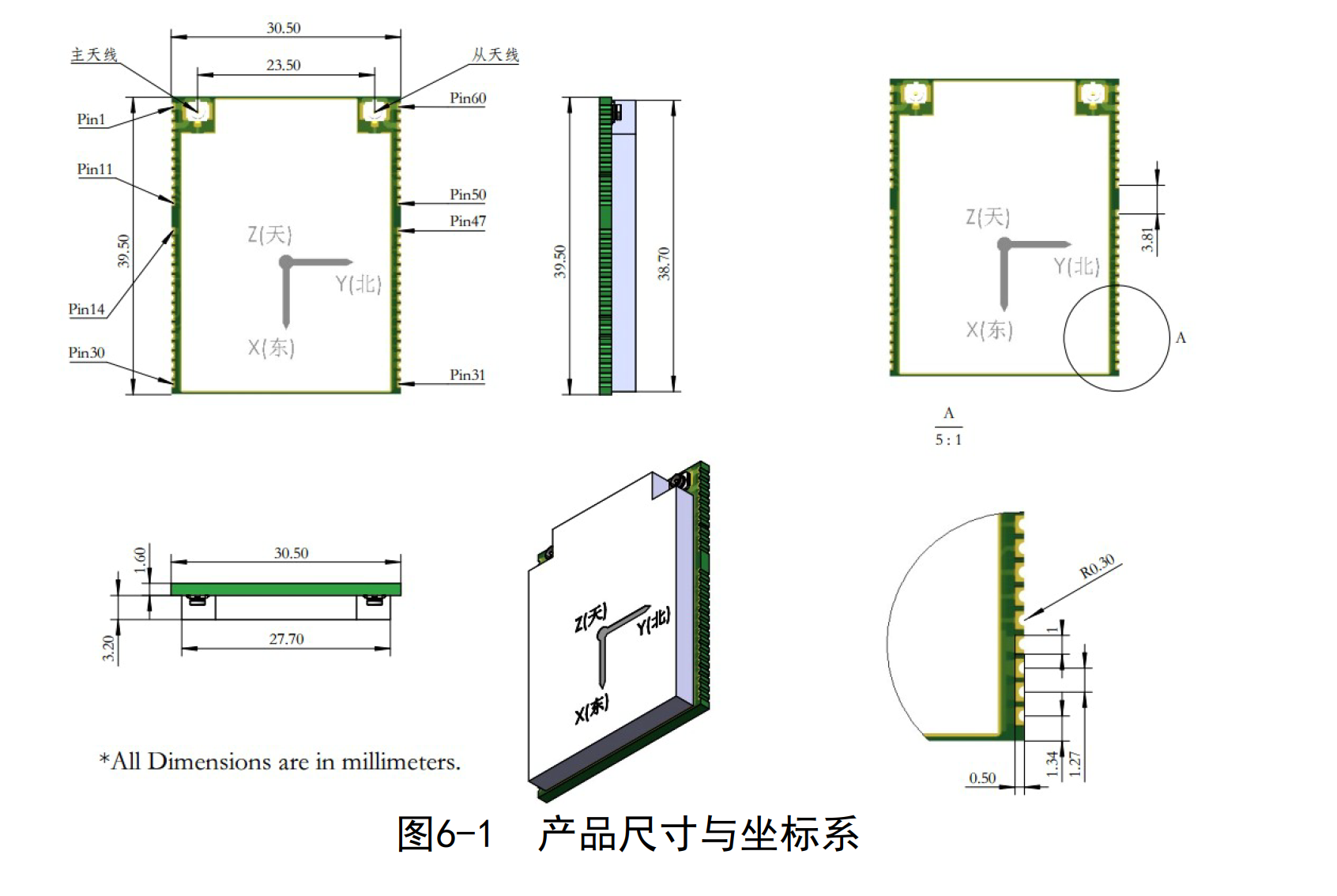
| 物理尺寸 | 39.5(L) × 30.5(W) × 4.8(H) mm |
| 重量 | ≤15g |
| 环境特性 |
|
|
| 工作温度 | -40 °C 〜 +85 °C |
| 存储温度 | -55 °C 〜 +95 °C |
| 振动 | 6.2g,20 〜 2000Hz |
| 冲击 | 100g, 8〜10ms |
5. 模块引脚定义
| 管脚编号 | 管脚定义 | 功能描述 | 备注 |
|---|
| 1 | GND |
|
|
| 2 | RSV | RSV, 保留管脚 |
|
| 3 | GND |
|
|
| 4 | GND |
|
|
| 5 | ANT1_PWR | GNSS 主天线供电输入 | 3.3〜12VDC 输入,给天线内馈电 |
| 6 | GND |
|
|
| 7 | RSV |
|
|
| 8 | RSV |
|
|
| 9 | GND |
|
|
| 10 | CAN1-TXD | CAN 通讯接口,TX |
|
| 11 | CAN1-RXD | CAN 通讯接口,RX |
|
| 12 | 空 | 无焊盘管脚 |
|
| 13 | 空 | 无焊盘管脚 |
|
| 14 | GND |
|
|
| 15 | RSV |
|
|
| 16 | RSV |
|
|
| 17 | V_BCKP | 当模块主电源断电时,V_BCKP 给相关寄存器供电。电平要求 2.0V~3.6V。常温@25°C,模块主电断电时,V_BCKP 的工作电流小于60uA。 | 不使用热启动功能时,V_BCKP 需接 VCC,不能接地或者悬空。 |
| 18 | GND |
|
|
| 19 | PVT_STAT | PVT 定位指示,高电平有效。模块能进行定位时输出高电平;不定位输出低电平。 |
|
| 20 | INS_STAT | INS 状态指示 |
|
| 21 | RSV |
|
|
| 22 | RSV |
|
|
| 23 | ERR_STAT | 卫星导航异常指示,高电平有效。模块系统自检不通过时,输出高电平;模块自检通过输出低电平。 |
|
| 24 | RTK_STAT | RTK 定位指示,高电平有效。RTK 固定解时输出高电平;其他定位状态或者不定位输出低电平。 |
|
| 25 | GND |
|
|
| 26 | RSV |
|
|
| 27 | RSV |
|
|
| 28 | RSV |
|
|
| 29 | RSV |
|
|
| 30 | RSV |
|
|
| 31 | 3.3V_VCC | 模块供电电源输入 |
|
| 32 | 3.3V_VCC | 模块供电电源输入 |
|
| 33 | GND |
|
|
| 34 | GND |
|
|
| 35 | UART1-TXD | 组合导航串口 1 |
|
| 36 | UART1-RXD | 组合导航串口 1 |
|
| 37 | UART2-TXD | 组合导航串口 2 |
|
| 38 | UART2-RXD | 组合导航串口 2 |
|
| 39 | UART-RSV-TXD | 保留串口 | 保留 |
| 40 | UART-RSV-RXD | 保留串口 | 保留 |
| 41 | RSV |
| 悬空 |
| 42 | RSV |
| 悬空 |
| 43 | GND |
|
|
| 44 | PPS | GNSS 秒脉冲输出 |
|
| 45 | EVENT | 事件输入信号 |
|
| 46 | RST_N | 复位信号,低电平有效。不用时可以悬空。 |
|
| 47 | GND |
|
|
| 48 | 空 | 无焊盘管脚 |
|
| 49 | 空 | 无焊盘管脚 |
|
| 50 | RSV |
|
|
| 51 | RSV |
|
|
| 52 | GND |
|
|
| 53 | RSV |
|
|
| 54 | RSV |
|
|
| 55 | GND |
|
|
| 56 | ANT2_PWR | GNSS 从天线供电输入 | 3.3〜12VDC 输入,给天线内馈电 |
| 57 | GND |
|
|
| 58 | GND |
|
|
| 59 | RSV |
|
|
| 60 | GND |
|
|
6. 产品尺寸与坐标系
7. 数据协议
7.1 数据类型
| 序号 | 数据协议名称 | 更新率 | 波特率 |
|---|
| 1 | GNSS导航数据 | 1/5/10Hz,可配置 | 9600/115200/460800,可选择,3 种数据同时生效 |
| 2 | 组合导航数据 | 1/5/10/20/25/50/100Hz/200Hz,可配置 |
|
| 3 | IMU 原始数据 | 1/5/10/20/25/50/100Hz/200Hz,可配置 |
|
注: 数据输出更新率与波特率需要协同配置,否则会导致串口卡死。3 种数据的更新率可根据需要配置选择不同的更新率,但同一个通讯接口只能选择工作在 1 个波特率状态。
7.2 数据协议
(省略)
8. 参考电路与PCB接口
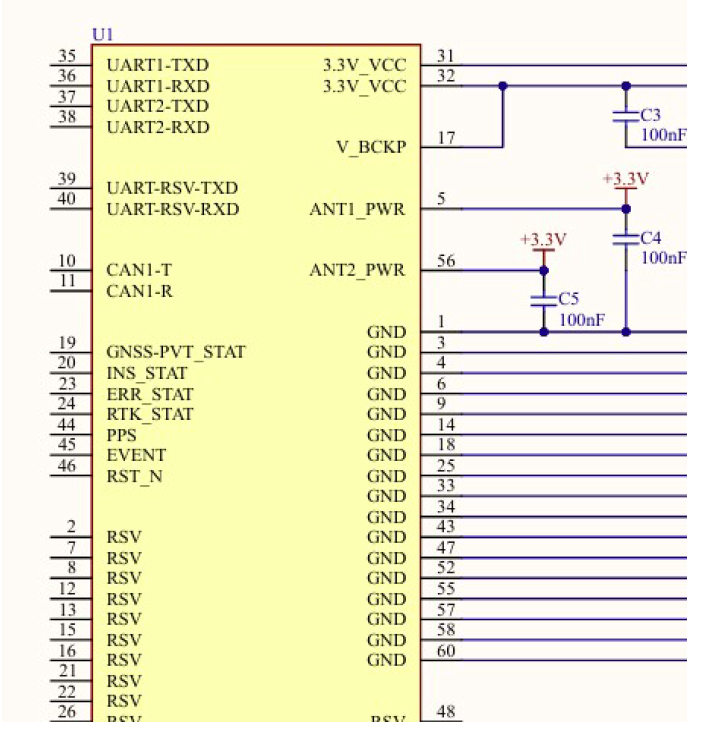
8.1 电源供电
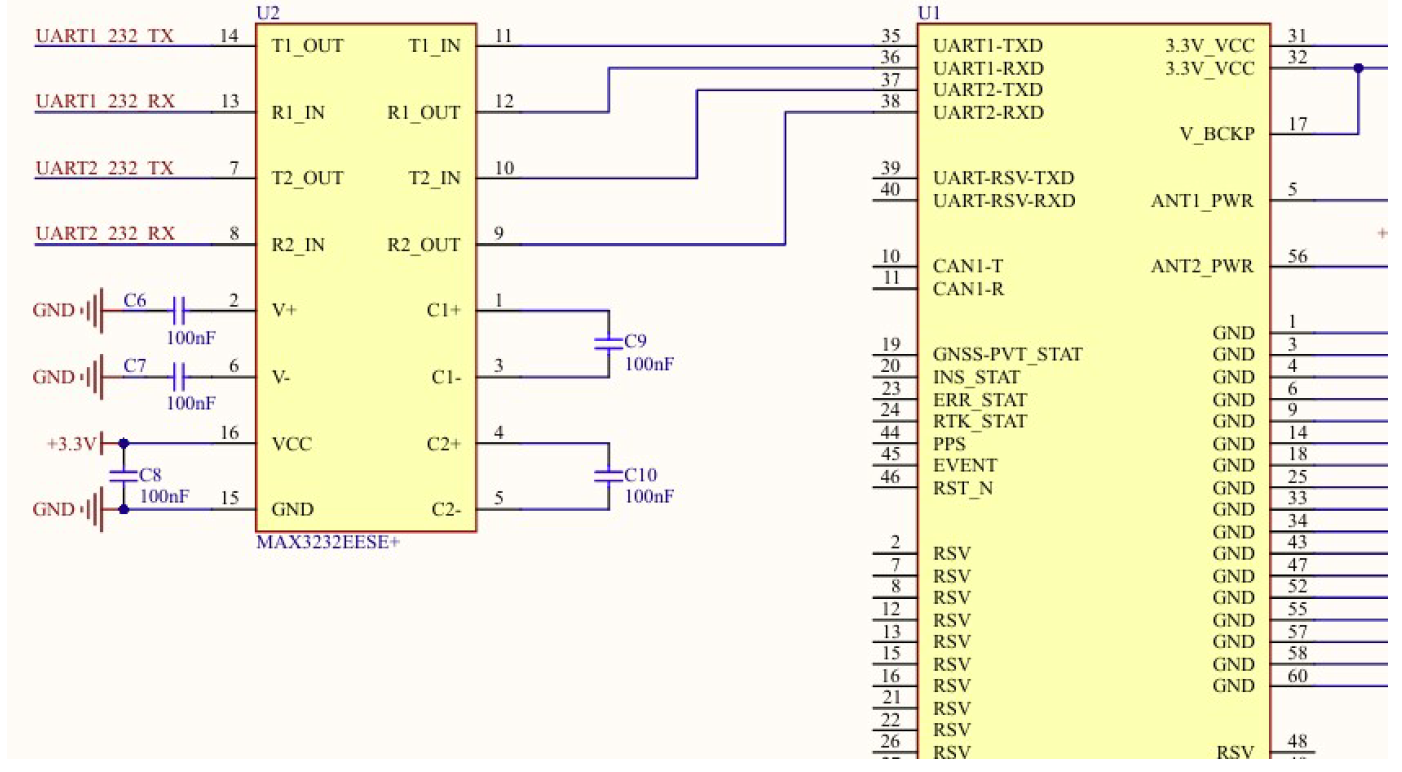
8.2 串口接口
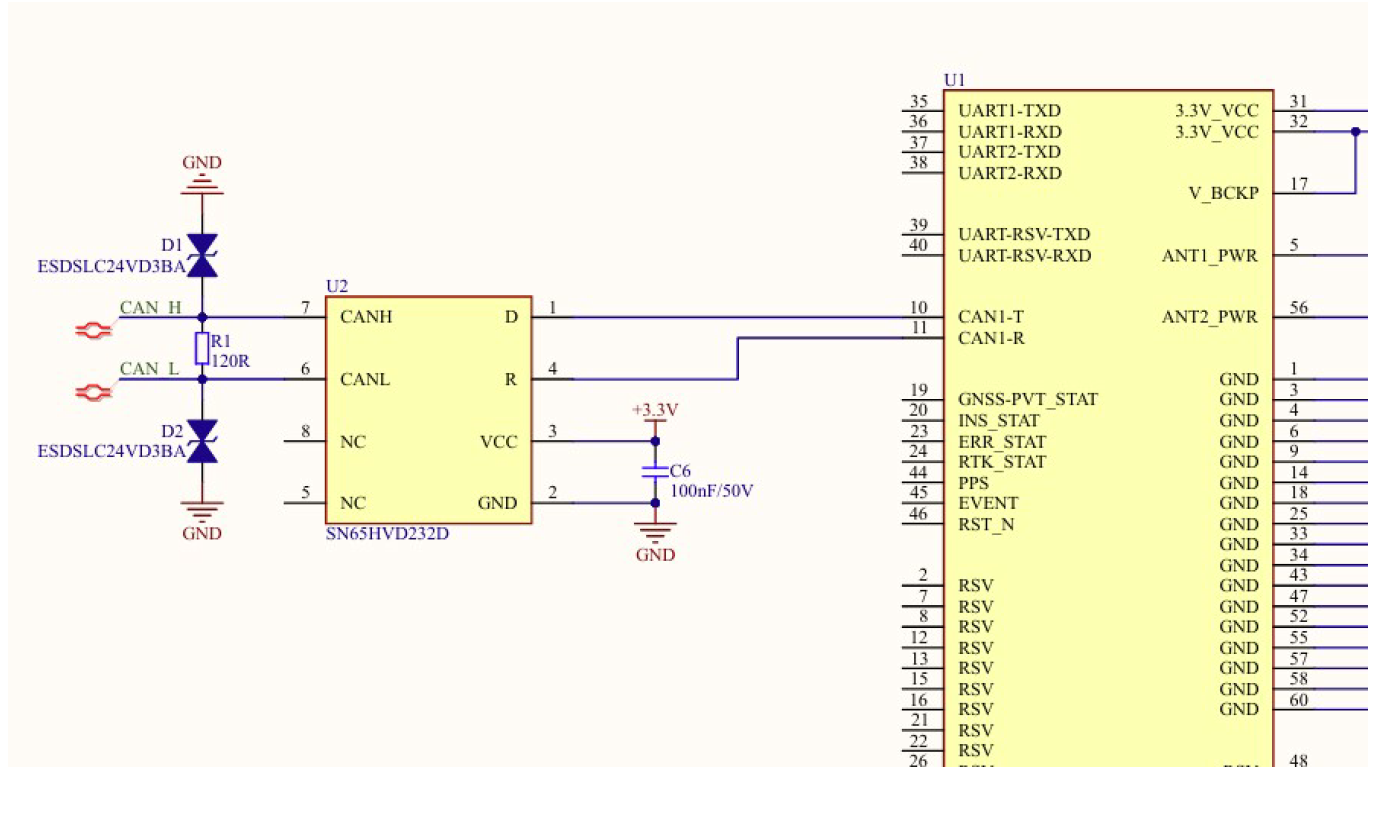
8.3 CAN接口
9. 注意事项
10. 其他事项
特殊产品可以根据客户实际要求进行定制。