MEMS IMU模块产品规格书
1. 产品简介
ZK-IMU-2603 高精度 MEMS IMU 模块,内置三轴 MEMS 陀螺仪、三轴 MEMS 加速度计,每个惯性传感器都实现了业界领先的信号调理技术,可提供优化的动态性能。工厂校准针对各传感器的灵敏度、偏置、对准和线性加速度(陀螺偏置)进行校准。因此,各传感器均有其自己的动态补偿公式,可提供精确的传感器测量。
2. 适用范围
ZK-IMU-2603 高精度陀螺仪可适用于消防、应急、军警单兵定位,工厂、工地、港口、货场、船舶、管廊、电力等重点区域人员和物资管控,园区/场馆/医院/商场人员定位、反向寻车,国土矿下测量、电信室内网络优化定位,公交、工程等特种车辆、AGV、机器人、无人机等高精度三维测姿、定位等。
3. 产品特点
低成本、体积小,模块封装、导线连接,适合 PCB 板或壳体集成安装。
4. 技术规格
| 参数模块 | 项目 | 测试条件 | 最小值 | 典型值 | 最大值 | 单位 |
|---|
| 陀螺仪 | 测量范围 |
|
| ±500 / ±250 |
| deg/s |
| 零偏稳定性 | Allan方差1σ,25°C |
|
| 3.5 | deg/h |
| 随机游走 | 1σ,25°C |
|
| 0.35 | deg/√h |
| 零偏重复性 | 1σ全温(10s静止或30s姿态动态传递) |
|
| ≤15 | °/h |
| 标度因数非线性 | FS=450°/s |
|
| ≤100 | ppm |
| 带宽 |
| 100 |
| 250 | HZ |
| 加速度计 | 量程 |
|
| ±10 / ±20 |
| g |
| 零偏稳定性 | 1σ,25°C |
| 0.2 |
| mg |
| 零偏重复性 | 1σ,25°C |
| 0.2 |
| mg |
| 标度因数非线性 |
|
|
| ≤300 | ppm |
| 带宽 |
| 100 |
| 250 | HZ 3dB |
| 通讯接口 | 更新率 |
| 100 | 200 | 1000 | HZ |
| 1路UART波特率 |
|
| 115.2 / 460.8 |
| Kbps |
| 电气特性 | 电压 |
| 3.0 | 3.3 | 3.6 | V |
| 功耗 |
|
|
| 0.2 ~ 1 | W |
| 纹波 | p-p |
|
| 100 | mV |
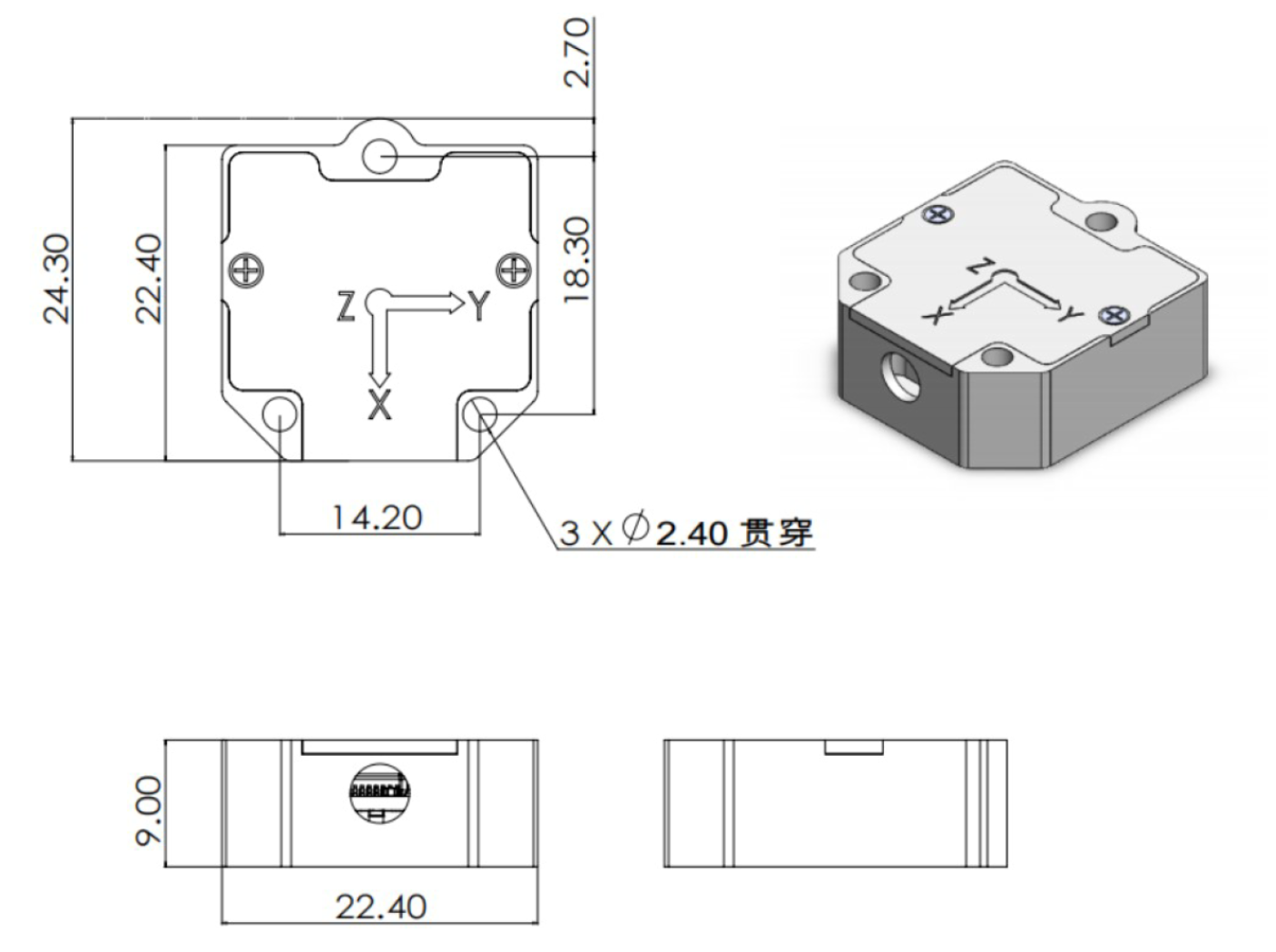
| 结构特性 | 尺寸 | 见尺寸图 |
|
|
| mm |
| 重量 |
|
|
| < 20 | g |
| 使用环境 | 工作温度 |
| -40 |
| 70 | °C |
| 存储温度 |
| -45 |
| 85 | °C |
| 振动 | 10~2000Hz, 8g |
|
|
|
|
| 冲击 |
|
|
| > 2000 | g |
5. 串口通讯接口
端口数量:1 个。
串口标准:TTL(3.3VDC)。
波特率:460800。
串口通信误码率:不大于 1×10^-6。
数据位:8。
停止位:1。
校验位:NONE。
数据默认上传频率:200Hz,数据自动上传,无需查询、配置;数据通信格式(float格式符合 IEEE754/854 标准)。
| 序号 | 数据 | 字节数 | 范围 | 备注 |
|---|
| 1 | 0X7E、0X7E | 2 |
| 帧头 |
| 2 | 0X43 | 1 |
| 长度值,固定值 |
| 3 | float | 4 |
| 时间(秒),0.001步进 |
| 4 | float | 4 |
| 备用 |
| 5 | float | 4 |
| 备用 |
| 6 | float | 4 |
| 备用 |
| 7 | float | 4 | [-20g, 20g] | 加速度计X(m/s²) |
| 8 | float | 4 | [-20g, 20g] | 加速度计Y(m/s²) |
| 9 | float | 4 | [-20g, 20g] | 加速度计Z(m/s²) |
| 10 | float | 4 | [-500, 500] | 陀螺仪X(°/S) |
| 11 | float | 4 | [-500, 500] | 陀螺仪Y(°/S) |
| 12 | float | 4 | [-500, 500] | 陀螺仪Z(°/S) |
| 13 | float | 4 | [-60, 100] | 温度(°C) |
| 14 | float | 4 |
| 备用 |
| 15 | float | 4 |
| 备用 |
| 16 | float | 4 |
| 备用 |
| 17 | float | 4 |
| 备用 |
| 18 | Byte | 1 |
| 备用 |
| 19 | Byte | 1 | [0,255] | 校验和((2~64)字节累加和的低8位) |
| 20 | 0XEB、0XEB | 2 |
| 帧尾 |
6. 引脚配置
| 引脚(导线颜色) | 引脚名称 | 类型 | 备注 |
|---|
| 红色线 | 3.3VDC | 电源输入 |
|
| 黑色线 | GND | 电源地 | 备用 |
| 黄色线 | Rx-1 | 串口输入 | TTL,3.3VDC |
| 绿色线 | TX-1 | 串口输出 | TTL,3.3VDC |
| 白色线 | I/O | 预留 |
|
| 棕色线 | I/O | 预留 |
|
7. 外形尺寸与坐标线